

Beskrivelse
Post-processed kinematic (PPK) is a method of using Global Navigation Satellite System (GNSS) data to accurately determine the position and trajectory of a rover/drone. PPK involves collecting raw GNSS data from a drone, along with information about the position and trajectory of nearby reference stations, and then processing the data after the fact to improve the accuracy of the position and trajectory information.
PPK is commonly used in applications such as surveying, mapping, and precision agriculture, where high-accuracy positioning is critical. Unlike Real-Time Kinematic (RTK) positioning, which requires a real-time wireless connection to reference stations, PPK can be done after the fact, allowing for greater flexibility in data collection.
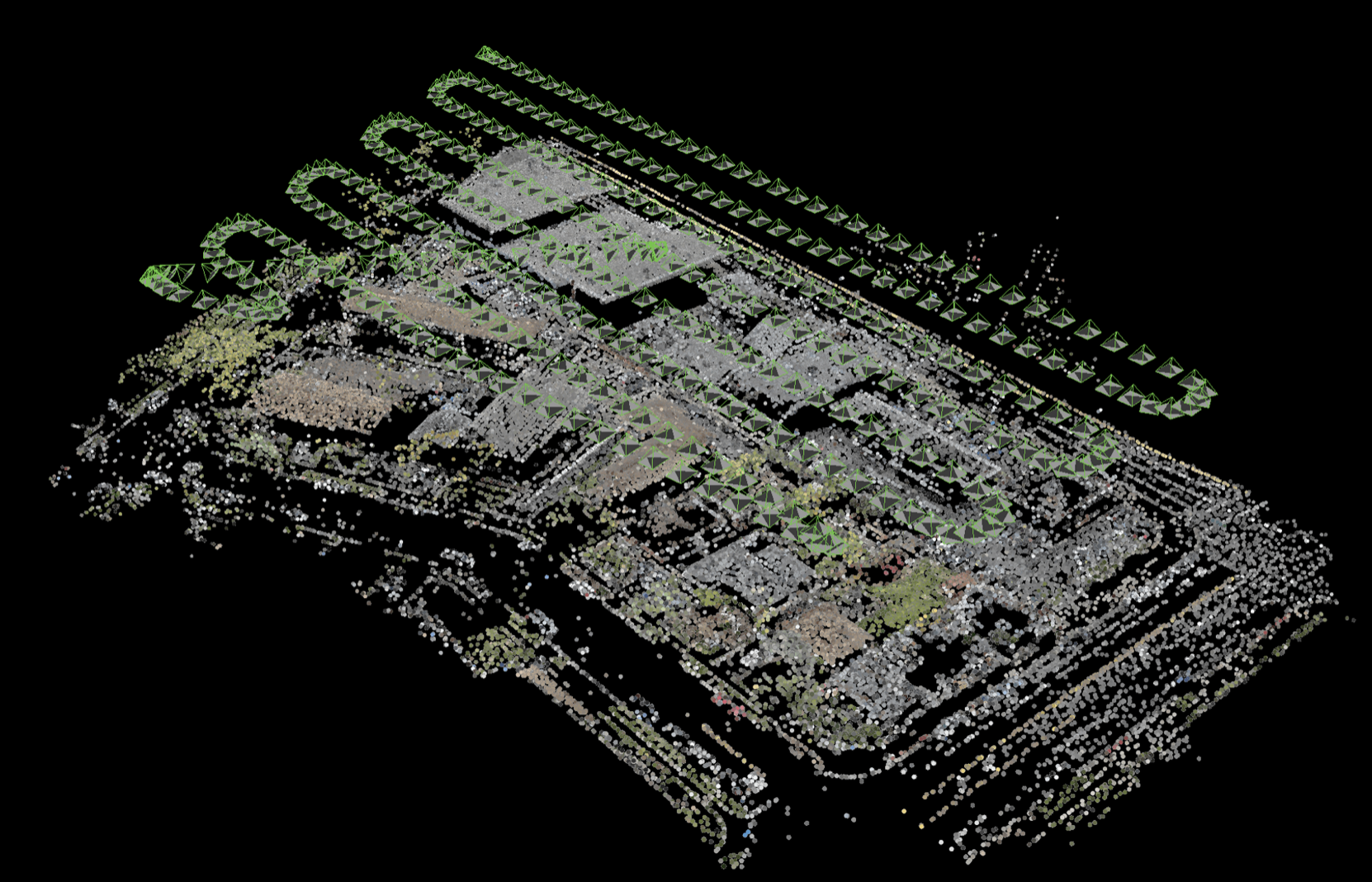
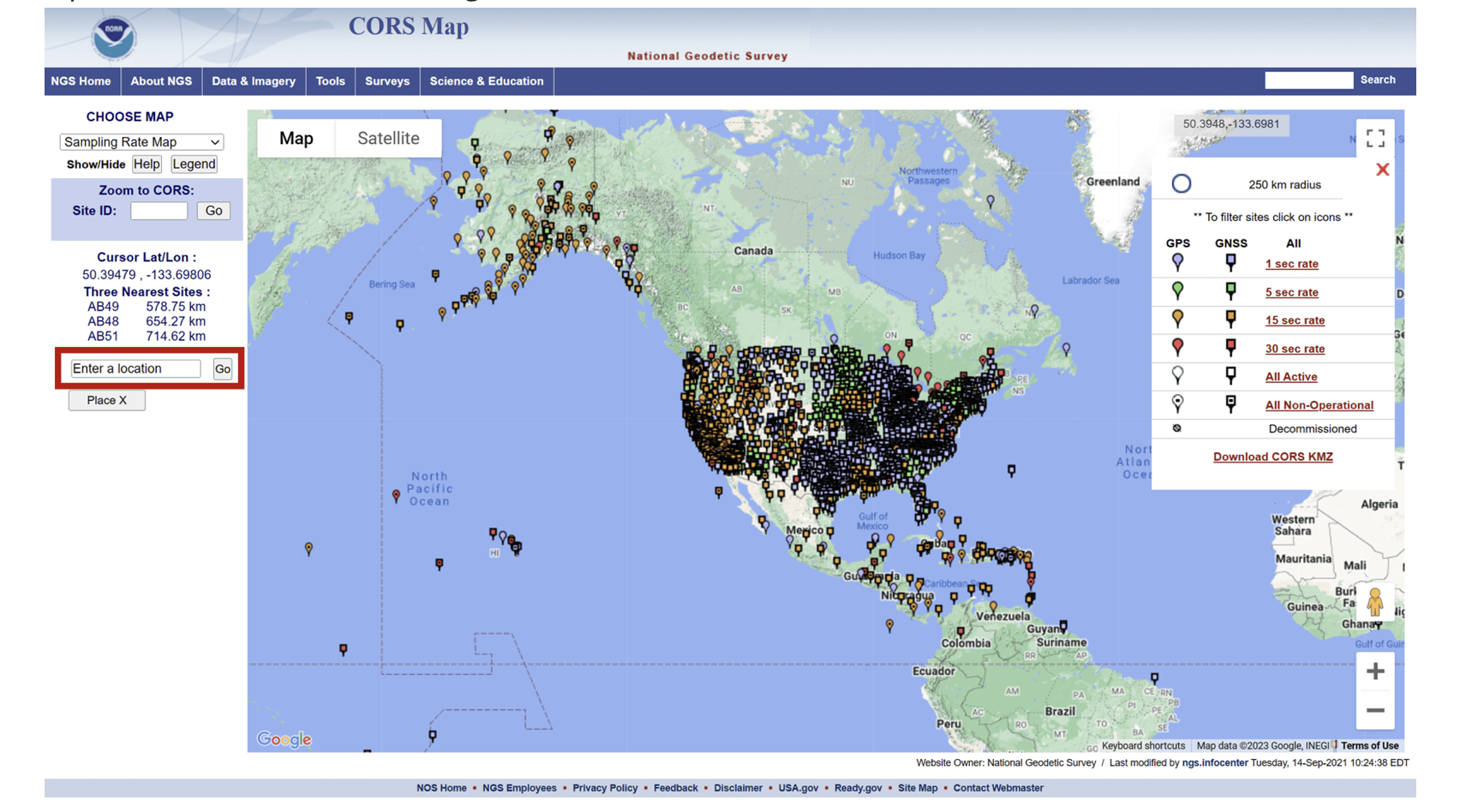
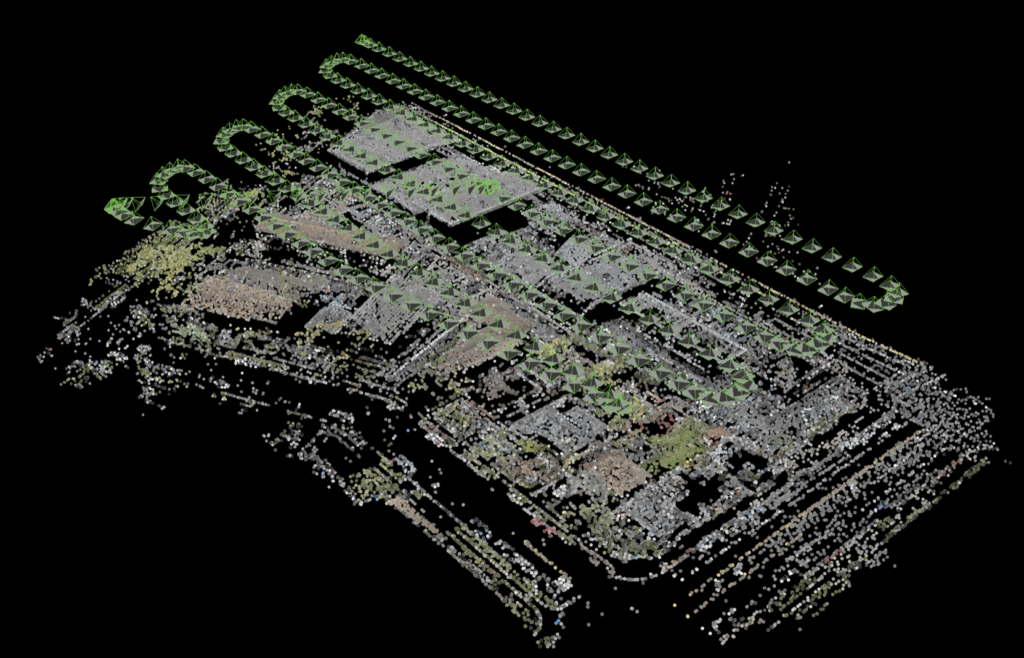
The post-processing of GNSS data involves using specialized software to process the raw data collected by the receiver and compare it with data from nearby reference stations to determine the precise location of the drone at a given point in time. This process can improve the accuracy of the position and trajectory information by correcting for errors introduced by factors such as atmospheric conditions and satellite orbit deviations.
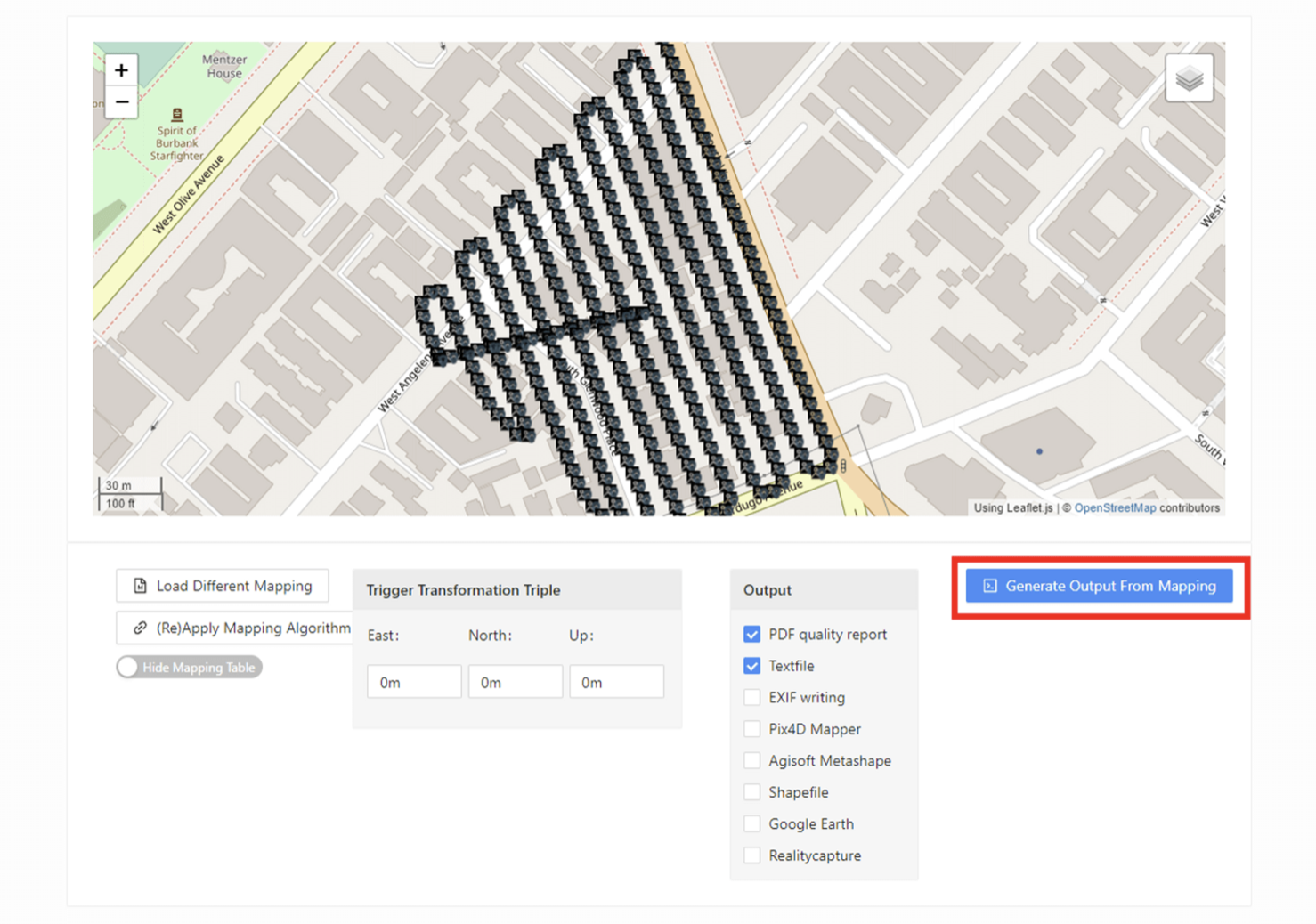
- The new Cloud PPK Service enables PPK corrections right in the GS RTK app.
- By using the D-RTK 2 High Precision GNSS Mobile Station as an RTK rover, users can now enjoy more flexibility in mission planning and execution.
- Break large areas into multiple flight missions automatically using the Block Segmentation feature with Multi-Aircraft Control improving the efficiency in mission planning and the map accuracy.
- Absolute Altitude Flight ensures mission repeatability and consistency across different operators when using Waypoint Flight.
- Elevation Accuracy Optimization is now available for Photogrammetry 2D and Block Segmentation missions, with the aircraft taking additional oblique images at the center of the mapping area at the end of the mission automatically


